
You’ve got to hand it to the roboticists at the University of Washington: They’ve built a robotic hand modeled so closely on human anatomy, it’s almost scary.
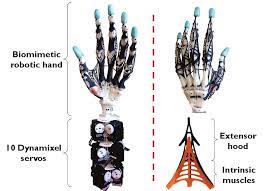
The hand uses plastic components that are modeled to mimic human bones, with crocheted ligaments, stringy tendons and rubber skin layered on top. Servo motors pull cables to copy the movement of muscles in a real hand.
When you hook up the contraption to sensors placed strategically around a human controller’s arm and hand, the robot appendage can hold a pen, grip a softball or balance a plate with near-human dexterity. IEEE Spectrum’s Evan Ackerman says it’s the “most detailed and kinematically accurate biomimetic anthropomorphic robotic hand that we’ve ever seen.”
Here’s the almost scary part: The developers of the hand, Zhe Xu and Emanuel Todorov, say it could point the way to artificial limb regeneration. They lay out the details in a research paper they’ve prepared for the International Conference on Robotics and Automation, set for May in Sweden. Todorov is at UW’s Movement Control Laboratory, while Zhe Xu received his Ph.D. at UW and is now at Yale.
Xu and Todorov say they plan to make their hand even more humanlike, and work with experts in tissue engineering to determine whether it could serve as “a bio-fabricated device/scaffold” for regenerated tissue. That’s not quite as science-fictiony as it sounds. This week, other researchers unveiled a 3-D bioprinter that can grow living tissue around polymer scaffolding.
So far, those researchers have conducted experiments with mice and rats, but not with humans. It will take years to apply the technology to human tissue regeneration. But when the time comes, roboticists like Xu and Todorov will be there to lend a hand.